✅稳定产能:400-600PCS/H,高效满足批量生产需求
✅ 省人增效:替代传统多工位人工,仅需约 6 人辅助上下料
✅ 多功能集成:一站式完成组装、点胶、光源安装、焊锡、锁付等工序
✅ 定制适配:支持多种规格直下式面板灯兼容生产,适配不同尺寸产品
三、工艺描述
|
序号 |
工序名称 |
附图 |
操作人数 |
说明 |
|
1 |
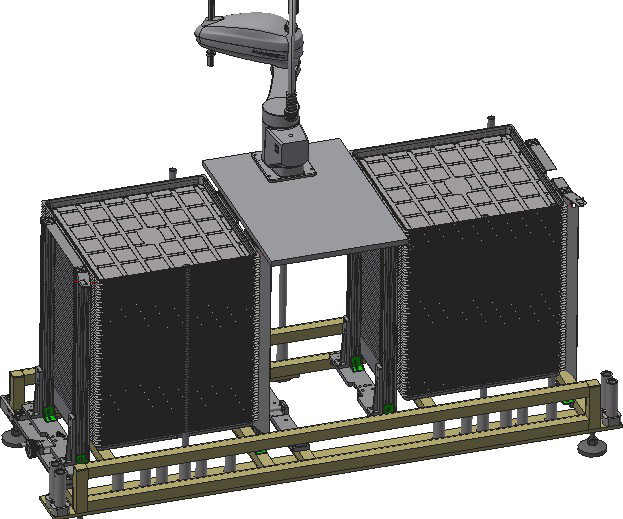
底盘自动上料 |
|
0.3
线外加料人员操作 |
采用自动升降机自动供料, 底壳开口朝上。设置左右两组升降机交替供料,采用机器人组件自动吸取并放置到上料流水线。加料间隔时 间约 30min。注:底壳堆料 是产品之间需有隔板,确保产品之间无机械卡死。 |
|
2 |
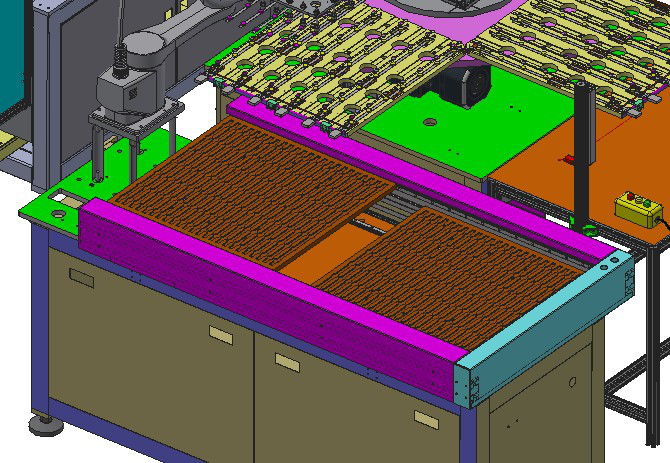
底壳输送储料 |
|
0 |
底壳上料后放置过渡皮带
线输送并储料约 5 个产品。 |
|
3
|
自动打热溶胶
|
|
0
|
配备两台热溶胶机及 4 |
|
个胶阀 |
||||
|
4
|
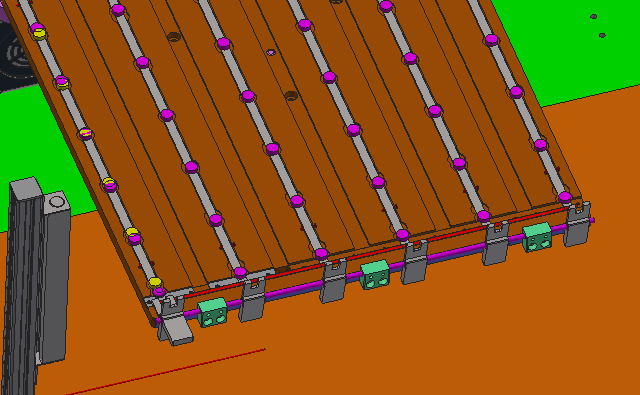
底壳自动打胶
|
|
0
|
6 个胶阀同时打胶,两组 |
|
供胶组件供胶,无胶时可 |
||||
|
自动切换供胶组,实现不 |
||||
|
停机换胶。 |
||||
|
5
|
光源条自动供料
|
|
1
|
采用交替式料盘供料,每 |
|
个料盘放置 24 条光源。 |
||||
|
机器人自动从料盘吸取 |
||||
|
光源条并放置焊接工装。 |
||||
|
6
|
人工放置导电软 板 |
|
1
|
人工放导热软板到固定 |
|
工装、对准光源焊盘并盖 |
||||
|
好软板压块 |
||||
|
7 |
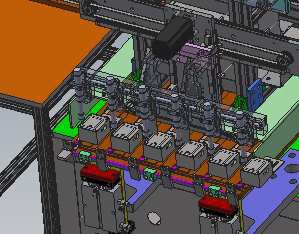
自动焊锡 |
|
0 |
采用 6 组焊枪同时焊锡 |
|
8
|
自动装光源
|
|
0
|
伺服机械手自动从光源 |
|
组件组装机抓取并装入 |
||||
|
底盘 |
||||
|
9 |
自动压光源 |
|
0 |
光源装好后自动压光源, |
|
使光源与底盘贴合良好 |
||||
|
10
|
机械手搬下料
|
/ |
|
机械手自动下料并搬运 |
|
至外置输送线 |
||||
|
人工在此线操作焊接输 |
|
11 |
人工焊接输入线 |
|
4-6 |
入线并装好线扣到底盘, 驱动热熔胶固定等手工工序 |
|
12 |
底盘组件自动组装 |
/ |
0 |
底盘组件自动抓取翻转并装入铝框组件 |
|
13 |
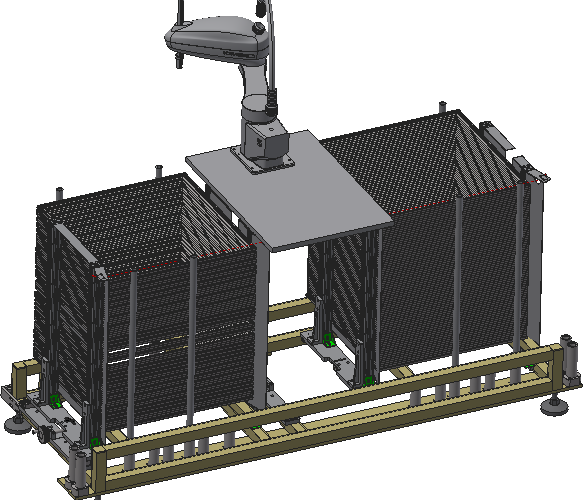
安装框自动上料 |
|
0.3
线外加料人员操作 |
采用自动升降机自动供料。设置左右两组升降机交替供料,采用机器人组件自动抓取并放置到上料流水线。加料间隔时间约 15min。 |
|
14 |
预留激光位 |
|
0 |
底部预留激光安装位,预留激光机通讯接口。设有激光头安装支架 1 个。不含激光 器 |
|
15 |
扩散板自动除尘 |
|
0 |
扩散板供料升降机顶端设置有离子风枪,采用离子风 枪除尘,并带有吸尘装置 |
|
16 |
扩散板自动上料 |
|
0.3
线外加料人员操作 |
采用自动升降机自动供料。设置左右两组升降机交替供料,采用机器人组件自动吸取并放置到上料流水线。 加料间隔时间约 30min。 |
|
17 |
自动装扩散板 |
/ |
0 |
自动从除尘机抓取并装
入安装框 |
|
18 |
自动装底盘组件 |
/ |
0 |
伺服机械手自动从过渡输送线抓取底盘组件并 装入安装框 |
|
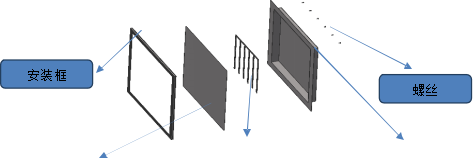
19 |
预留人工预锁螺
丝工站 |
|
2 |
预留人工预锁工站 |
|
|
|
/ |
0 |
X 轴两边采用双伺服模 |
|
20 |
自动锁螺丝 Y |
|
|
组平台自动锁螺丝,采用
4 套供料器分开供料 |
|
21 |
自动锁螺丝 X |
/ |
0 |
Y 轴两边采用双伺服模组平台自动锁螺丝,采用 2 套供料器分开供料 |
|
22 |
自动下料 |
/ |
0 |
自动下料到下料输送线 |
本系统兼容 595*595-620*620 外形尺寸直下式面板灯
1、工作效率:400-600PCS/H
2、操作人工:6-9 人 (按产品工序不同而定)
2、额定输入功率:15KW
3、设备尺寸:24*4.5*1.4M(长*宽*高)
|
名称 |
品牌 |
备注 |
|
机器人本体 |
鑫锐特 |
正品 |
|
机器人控制器 |
众为兴 |
正品 |
|
导轨、滑块 |
台湾上银 |
正品 |
|
气动元件 |
AIRTAC/SMC |
正品 |
|
PLC |
台达 |
正品 |
|
HMI |
威纶、台达 |
正品 |
|
继电器 |
欧姆龙 |
正品 |
|
开关电源 |
DALTA、MEANWELL |
正品 |
|
异步电机 |
精研 |
正品 |
|
分割器 |
山东大学瑞华 |
正品 |
|
伺服电机 |
众为兴/台达 |
正品 |
|
步进电机 |
锐特/雷赛 |
正品 |
|
变频器 |
台达 |
正品 |
|
编码器 |
欧姆龙 |
正品 |
|
轴承 |
NSK、HRB |
正品 |
|
传感器 |
松下/同等品牌 |
正品 |
|
磁性开关 |
AIRTAC |
正品 |
|
产品型号 Robot model |
XRT006-600 |
|
|
功能 Function |
上下料、3C material handling, 3C products |
|
|
|
||
|
轴数 Total axes |
|
4 |
|
负载 Payload |
|
6kg |
|
重复定位精度 Position rep |
eat accuracy |
±0.03mm |
|
最大单轴速度 Max speed |
1 轴 1st axis |
720゜/sec |
|
2 轴 2nd axis |
720゜/sec |
|
|
3 轴 3rd axis |
1000mm/sec |
|
|
|
4 轴 4th axis |
2500゜/sec |
|
各轴运动范围 Max operating area |
1 轴 1st axis |
±132゜ |
|
2 轴 2nd axis |
±141゜ |
|
|
|
190mm |
|
|
|
3 轴 3rd axis |
|
|
|
4 轴 4th axis |
±360゜ |
|
安装方式 Installation para |
meters |
地面支架安装 Floor mounted |
|
|
||
|
本体重量 Robot weight |
|
13Kg |
|
能耗 Power consumption |
|
0.7kw |
|
最大臂展 Maximum reach |
|
600mm |
|
安装环境 Installation environment |
温度 Temperature |
0~+45℃ |
|
湿度 Humidity |
20~80%RH(无结露) |
|
|
|
振动 Vibration |
4.9M/S²以下 |